Лекция 7. Геометрическое решение задач линейного программирования. Основные теоремы линейного программирования. Симплекс метод для решения задач линейного программирования.
Если система ограничений задачи линейного программирования представлена в виде системы линейных неравенств с двумя переменными, то такая задача может быть решена геометрически. Таким образом, данный метод решения ЗЛП имеет очень узкие рамки применения.
Однако метод представляет большой интерес с точки зрения выработки наглядных представлений о сущности задач линейного программирования.
Геометрический (или графический) метод предполагает последовательное выполнение ряда шагов. Ниже представлен порядок решения задачи линейного программирования на основе ее геометрической интерпретации.
2. Построить на плоскости прямые, уравнения которых получаются в результате замены в ограничениях знаков неравенств на знаки точных равенств.
3. Найти полуплоскости, определяемые каждым из ограничений задачи.
4. Найти область допустимых решений.
5. Построить прямую c1x1 + c2x2 = h, где h — любое положительное число, желательно такое, чтобы проведенная прямая проходила через многоугольник решений.
6. Перемещать найденную прямую параллельно самой себе в направлении увеличения (при поиске максимума) или уменьшения (при поиске минимума) целевой функции. В результате, либо отыщется точка, в которой целевая функция принимает максимальное (минимальное) значение, либо будет установлена неограниченность функции на множестве решений.
7. Определить координаты точки максимума (минимума) функции и вычислить значение функции в этой точке.
Далее рассмотрим пример решения ЗЛП графическим методом. Для этого воспользуемся представленной выше задачей о хоккейных клюшках и шахматных наборах.
1. Выше уже приводилась формулировка задачи, здесь нам остается лишь повторить ее:

= 2x1+ 4x2→ max;

2. Теперь построим прямые, соответствующие каждому из функциональных ограничений задачи. Эти прямые обозначены на рисунке (1), (2) и (3).

3. Штрихи на прямых указывают полуплоскости, определяемые ограничениями задачи.
4. Область допустимых решений включает в себя точки, для которых выполняются все ограничения задачи. В нашем случае область представляет собой пятиугольник (на рисунке обозначен ABCDO и окрашен синим цветом).
5. Прямая, соответствующая целевой функции, на рисунке представлена пунктирной линией.
6. Прямую передвигаем параллельно самой себе вверх (направление указано стрелкой), поскольку именно при движении в этом направлении значение целевой функции увеличивается. Последней точкой многоугольника решений, с которой соприкоснется передвигаемая прямая, прежде чем покинет его, является точка C. Это и есть точка, соответствующая оптимальному решению задачи.
7. Осталось вычислить координаты точки С. Она является точкой пересечения прямых (1) и (2). Решив совместно уравнения этих прямых, найдем:  ,
, . Подставляя найденные величины в целевую функцию, найдем ее значение в оптимальной точке
. Подставляя найденные величины в целевую функцию, найдем ее значение в оптимальной точке .
.
Таким образом, для максимизации прибыли компании следует ежедневно выпускать 24 клюшки и 4 набора. Реализация такого плана обеспечит ежедневную прибыль в размере $64.
Для обоснования методов решения задач линейного программирования сформулируем ряд важнейших теорем, опуская их аналитические доказательства. Уяснить смысл каждой из теорем поможет понятие о геометрической интерпретации решения ЗЛП, данное в предыдущем подразделе.
Однако сначала напомним о некоторых понятиях, важных с точки зрения дальнейшего разговора.
Теорема 1. Множество всех допустимых решений системы ограничений задачи линейного программирования является выпуклым.
В частном случае, когда в систему ограничений входят только две переменные x1 и x2, это множество можно изобразить на плоскости. Так как речь идет о допустимых решениях (x1, x2 ≥ 0), то соответствующее множество будет располагаться в первой четверти декартовой системы координат. Это множество может быть замкнутым (многоугольник), незамкнутым (неограниченная многогранная область), состоять из единственной точки и, наконец, система ограничений-неравенств может быть противоречивой.
Теорема 2. Если задача линейного программирования имеет оптимальное решение, то оно совпадает с одной (двумя) из угловых точек множества допустимых решений.
Из теоремы 2 можно сделать вывод о том, что единственность оптимального решения может нарушаться, причем, если решение не единственное, то таких оптимальных решений будет бесчисленное множество (все точки отрезка, соединяющего соответствующие угловые точки).
Теорема 3. Каждому допустимому базисному решению задачи линейного программирования соответствует угловая точка области допустимых решений, и наоборот.
Следствием из теорем 2 и 3 является утверждение о том, что оптимальное решение (оптимальные решения) задачи линейного программирования, заданной (или приведенной) ограничениями-уравнениями, совпадает с допустимым базисным решением (допустимыми базисными решениями) системы ограничений.
Таким образом, оптимальное решение ЗЛП следует искать среди конечного числа допустимых базисных решений.
Симплекс-метод был разработан и впервые применен для решения задач в 1947 г. американским математиком Дж. Данцигом.
Симплексный метод в отличие от геометрического универсален. С его помощью можно решить любую задачу линейного программирования.
В основу симплексного метода положена идея последовательного улучшения получаемого решения.
Геометрический смысл симплексного метода состоит в последовательном переходе от одной вершины многогранника ограничений к соседней, в которой целевая функция принимает лучшее (или, по крайней мере, не худшее) значение до тех пор, пока не будет найдено оптимальное решение — вершина, где достигается оптимальное значение функции цели (если задача имеет конечный оптимум).
Таким образом, имея систему ограничений, приведенную к канонической форме (все функциональные ограничения имеют вид равенств), находят любое базисное решение этой системы, заботясь только о том, чтобы найти его как можно проще. Если первое же найденное базисное решение оказалось допустимым, то проверяют его на оптимальность. Если оно не оптимально, то осуществляется переход к другому, обязательно допустимому базисному решению. Симплексный метод гарантирует, что при этом новом решении целевая функция, если и не достигнет оптимума, то приблизится к нему (или, по крайней мере, не удалится от него). С новым допустимым базисным решением поступают так же, пока не отыщется решение, которое является оптимальным.
Процесс применения симплексного метода предполагает реализацию трех его основных элементов:
1) способ определения какого-либо первоначального допустимого базисного решения задачи;
2) правило перехода к лучшему (точнее, не худшему) решению;
3) критерий проверки оптимальности найденного решения.
Симплексный метод включает в себя ряд этапов и может быть сформулирован в виде четкого алгоритма (четкого предписания о выполнении последовательных операций). Это позволяет успешно программировать и реализовывать его на ЭВМ. Задачи с небольшим числом переменных и ограничений могут быть решены симплексным методом вручную.
Далее рассмотрим симплексный алгоритм, не углубляясь в его обоснование.
Реализация симплекс-алгоритма включает восемь шагов. Опишем их, параллельно рассматривая пример выполнения каждого шага в применении к задаче о хоккейных клюках и шахматных наборах.
Шаг 1. Формулировка ЗЛП (формирование целевой функции и системы ограничений).
Для определенности будем считать, что решается задача на отыскание максимума. Ниже приведем общую постановку такой задачи.

= c1x1+ c2x2+ . + cnxn->max;
Геометрический метод решения ЗЛП
Геометрический метод решения ЗЛП применяется в случае, если задача содержит не более двух переменных или может быть сведена к таковой.
Каждое из неравенств системы ограничений геометрически определяет полуплоскость допустимых значений переменных с граничными прямыми.
Алгоритм геометрического метода:
1. В системе ограничений знаки неравенств заменяются на знаки точных равенств и по полученным уравнениям строятся прямые на плоскости x 1 Ox 2.
2. Определяются полуплоскости – области решения неравенств, и строится многоугольник решений (ОДР), который получается в результате пересечения полуплоскостей. Стороны этого многоугольника являются прямыми уравнений системы ограничений.
4. Из точки (0; 0) строится вектор , направление которого определяет направление возрастания целевой функции c 1 x 1 + c 2 x 2.
5. Строится начальная прямая (линия нулевого уровня) целевой функции c 1 x 1 + c 2 x 2 = 0, которую передвигают в направлении вектора до крайней угловой точки многоугольника решений. В этой точке целевая функция принимает max значение.
6. Определяются координаты точки максимума целевой функции как точки пересечения соответствующих прямых и вычисляется значение целевой функции в этой точке .
В нашем случае система уравнений будет иметь вид:
Построим по полученным уравнениям прямые и пронумеруем их (рис.1). Областью ОДР будет выпуклый многоугольник АBCDEF, каждая вершина которого является опорным планом. Из точки (0; 0) строим вектор . Начальная линия уровня будет иметь вид: 4 x 1 + 3 x 2 = 0. Перемещая линию уровня вдоль вектора , получим, что функция F принимает max значение в точке D – самой крайней справа вершине многоугольника ОДР. Точка D является точкой пересечения прямых (2) и (3). Находим координаты точки D, решая систему уравнений этих прямых:
Решением системы будут значения x 1 = 9, x 2 = 6, т.е. D (9; 6). Тогда
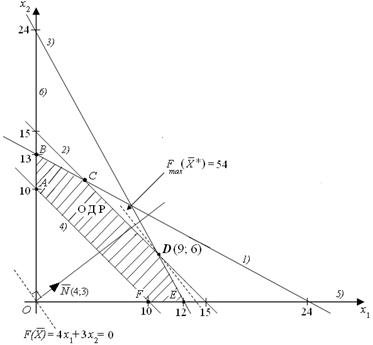
Рис. 1. Иллюстрация геометрического метода решения ЗЛП
Таким образом, решением задачи будет оптимальный план , дающий max значение функции 54 у.е. Максимальная прибыль 54 у.е. достигается при изготовлении 9 единиц изделий I вида и 6 единиц изделий II вида.
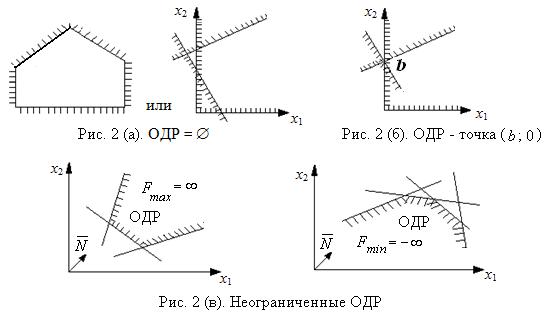
В данной задаче ОДР является выпуклый многоугольник. Однако возможны и следующие случаи:
1) ОДР – пустое множество (рис.2, а). В этом случае задача линейного программирования не имеет решения из-за несовместности системы ограничений.
2) ОДР – единственная точка, которая и будет единственным и оптимальным решением (рис.2, б).
3) ОДР – выпуклая неограниченная область (рис.2, в). В задаче на max оптимальное решение не существует, если целевая функция не ограничена сверху (Fmax = ∞). В задаче на min оптимальное решение не существует, если целевая функция не ограничена снизу (Fmin = –∞).
4) Может оказаться, что линия уровня функции F совпадает с одной из сторон многоугольника ОДР (экстремум целевой функции достигается на всем отрезке между двумя соседними вершинами ОДР) (рис.3). Тогда имеет место альтернативный оптимум: , где t є [0; 1] – параметр.
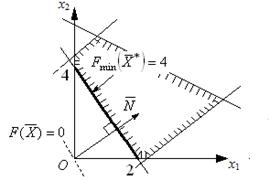
Рис. 3. Альтернативный оптимум
Формы записи задачи линейного программирования
Существуют три формы записи ЗЛП: каноническая, стандартная, общая.
В канонической (основной) форме все ограничения имеют вид уравнений, т.е. , а также условие неотрицательности накладывается на все переменные: . В стандартной форме все ограничения записаны в виде нестрогих неравенств, и также . В общей формеограничения могут быть представлены как уравнениями, так и неравенствами, а условие неотрицательности может накладываться не на все, а только на часть переменных .
Понравилась статья? Добавь ее в закладку (CTRL+D) и не забудь поделиться с друзьями: